|
I am now a Lecturer (Assistant Professor) at the Department of Electronic Science and Technology, National University of Defense Technology (NUDT), China.
Email / Google Scholar / LinkedIn / Twitter |

|
|
July 2023: Happy to announce that our paper PlaneRecTR got accepted to ICCV 2023, RaNeRF got accepted to T-GRS 2023! June 2023: Happy to announce that our paper TsCM got accepted to T-PAMI 2023! Jan 2023: Happy to announce that our paper EDAL got accepted to ICLR 2023! Dec 2022: Happy to announce that our paper iLabel got accepted to RA-L! Feb 2022: The codes and data of Semantic-NeRF are now released! Jan 2022: Happy to announce that our paper ReCo got accepted to ICLR 2022. Oct 2021: Attended GAMES Webminar of semantic scene representations. Oct 2021: Attended ICCV 2021 3DReps Workshop and presented Semantic-NeRF in poster session. Sep 2021: Gave a talk of Semantic-NeRF in a Webinar of neural implicit representations held by GAUSSIAN ROBOTICS and TechBeat. July 2021: Happy to announce that our paper Semantic-NeRF got accepted to ICCV 2021 as Oral Presentation (top 3%)! Feb 2019: SceneCode got accepted to CVPR 2019. July 2018: Participated International Computer Vision Summer School (ICVSS 2018) in Sicily, Italy. |
|
|
|
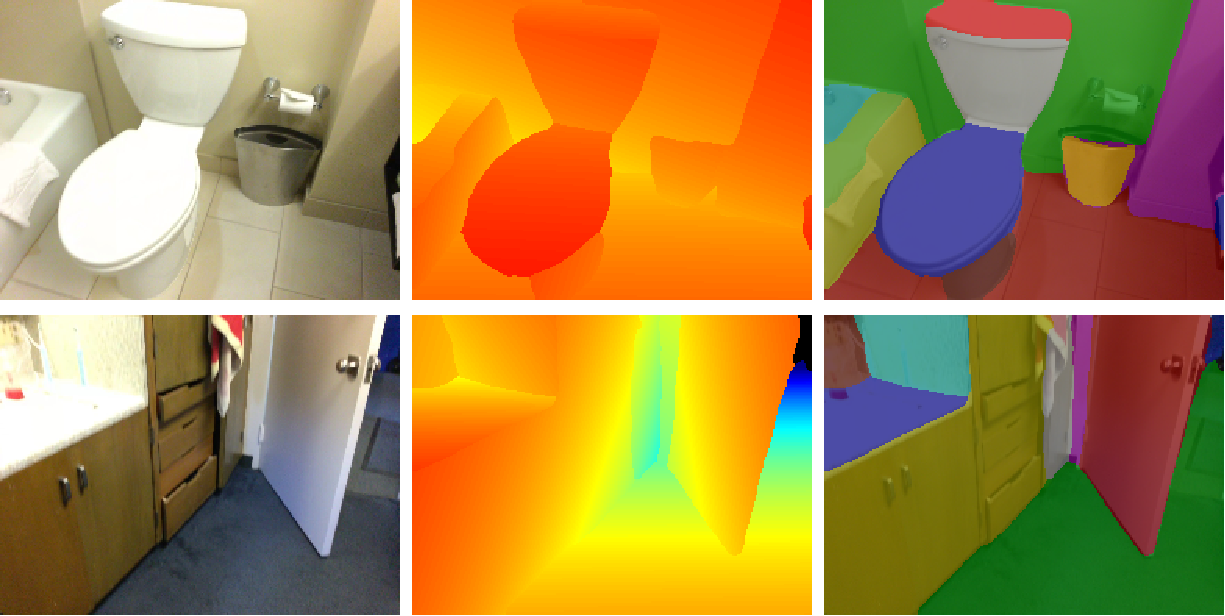
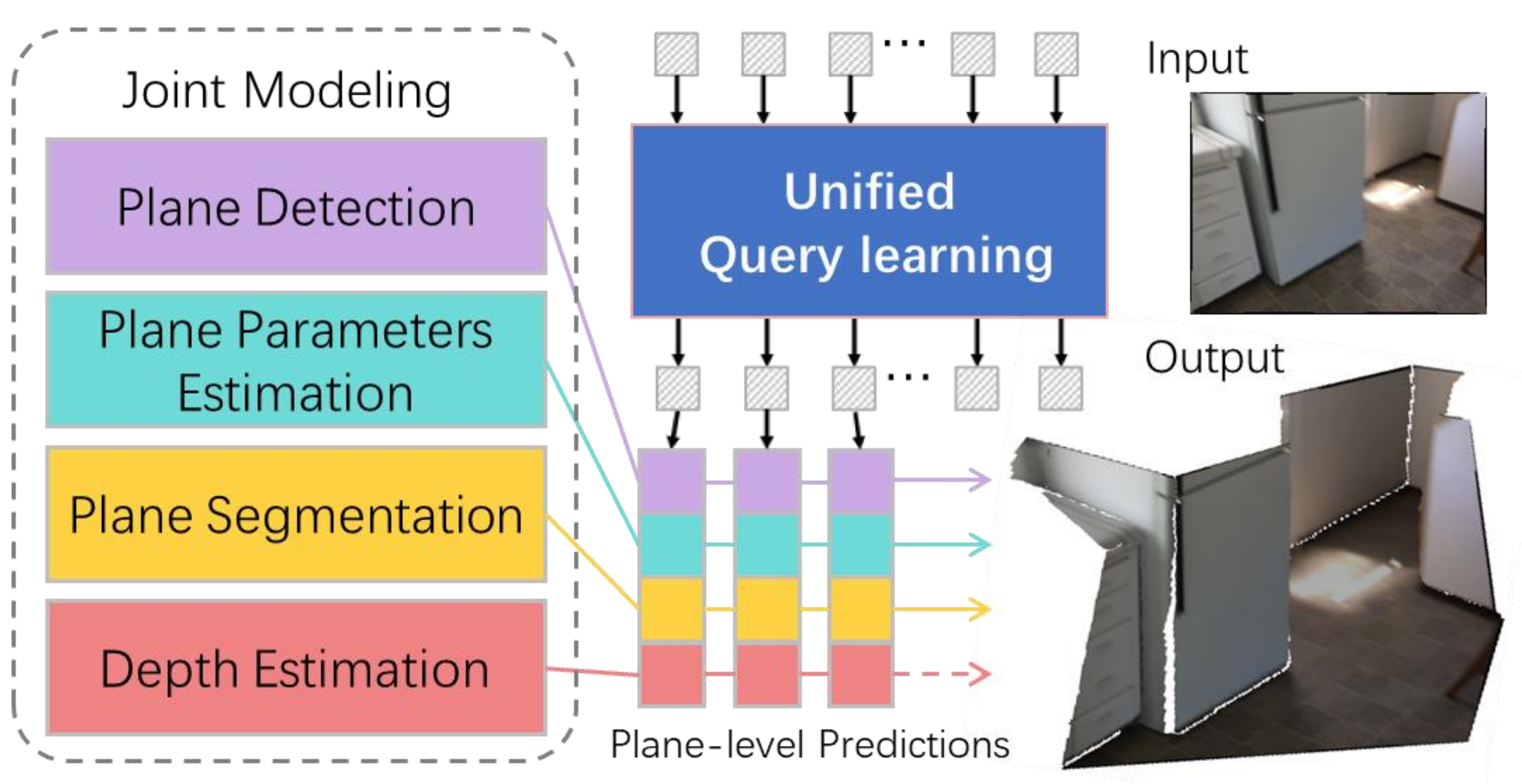
PlaneRecTR is a vision transformer architecture with query-based learning, and for the first time unifies all subtasks of single-view plane recovery with a single compact model.
Mutual benefits between planar geometry and segmentation can be obtained by PlaneRecTR, achieving SOTA performance on ScanNet and NYUv2-Plane datasets.
|
|
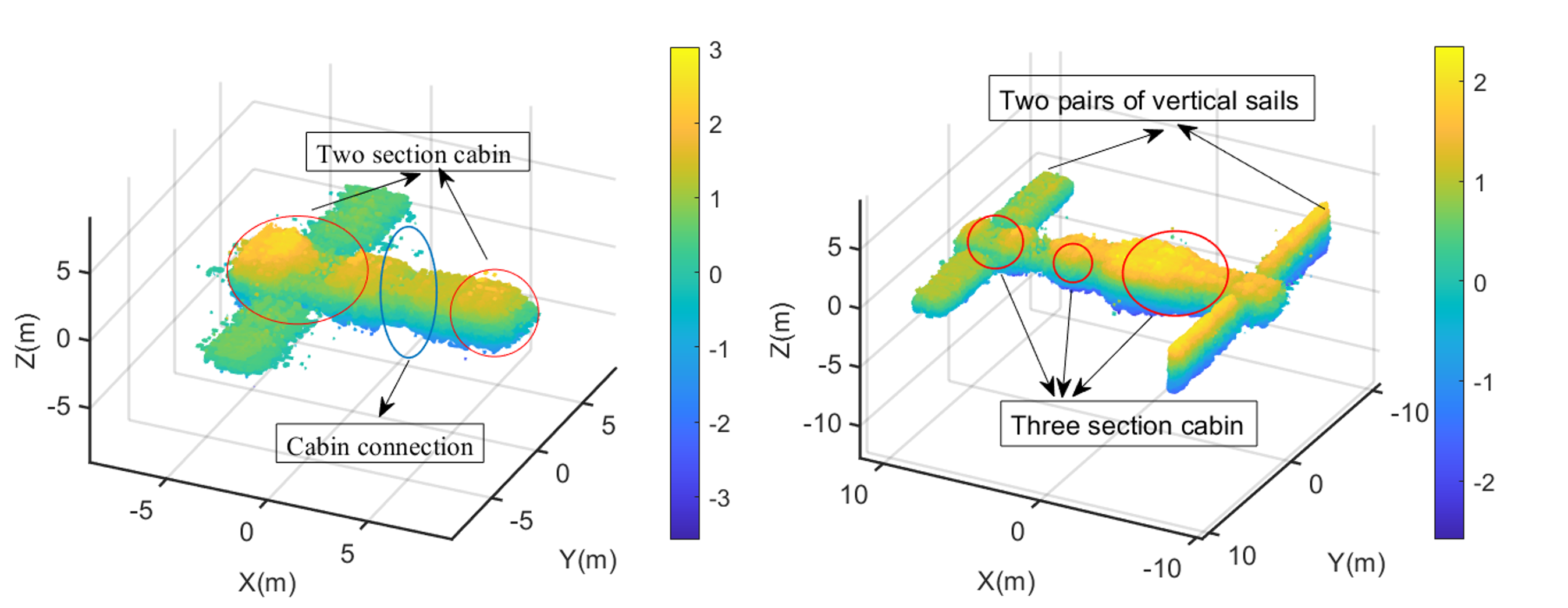
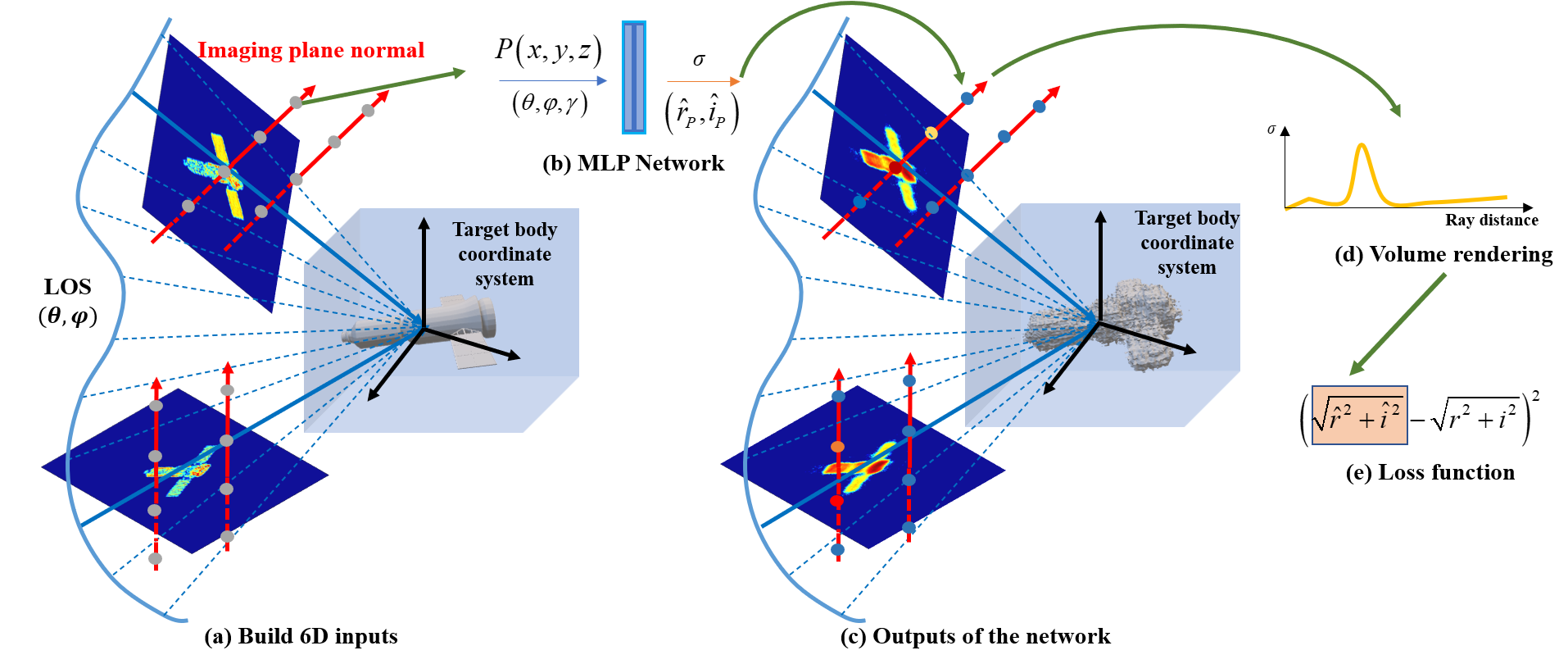
RaNeRF is a novel 3D target reconstruction method using only observed ISAR image sequences, built upon powerful neural radiance fileds. |
|
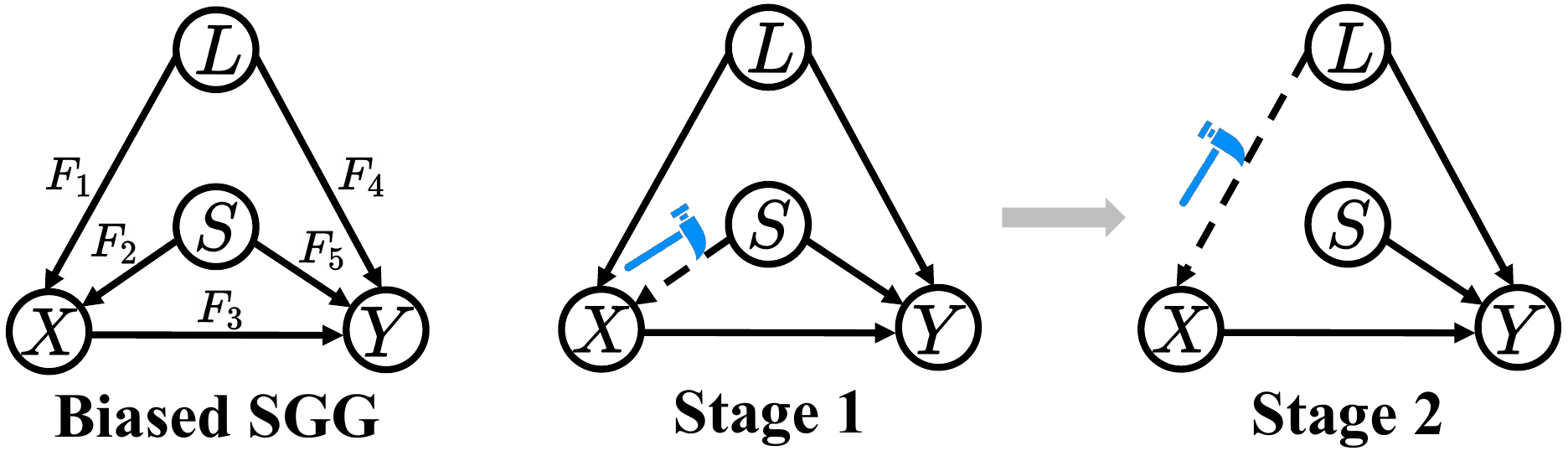
We propose Two-stage Causal Modeling (TsCM) for unbiased SGG predictions. Taking the long-tailed distribution and semantic confusion as confounders to the Structural Causal Model (SCM), we decouple the causal intervention into two stages. As a model agnostic method, TsCM achieves a better tradeoff between head and tail relationships. |
|
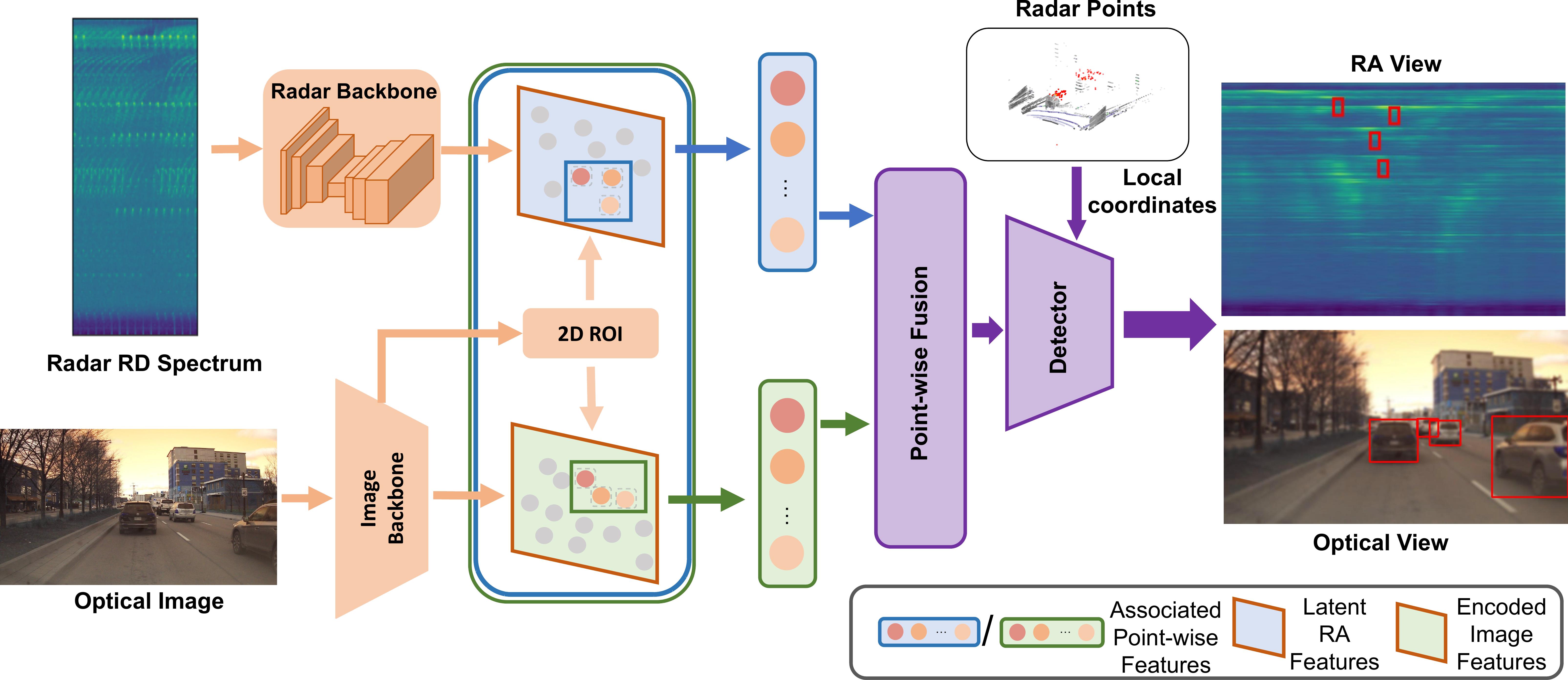
We propose ROFusion, a hybrid point-wise Radar-Optical fusion approach for object detection in autonomous driving scenarios, motivated by dense contextual information from both the range-doppler spectrum and images. |
|
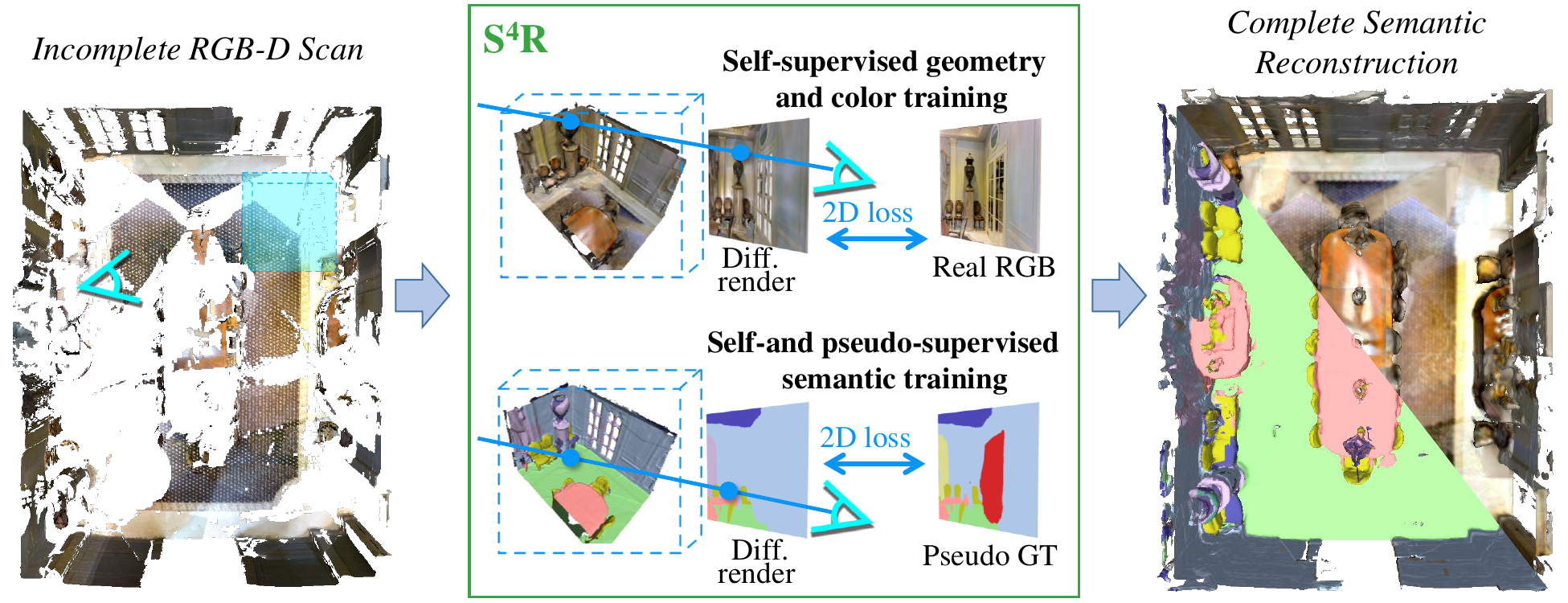
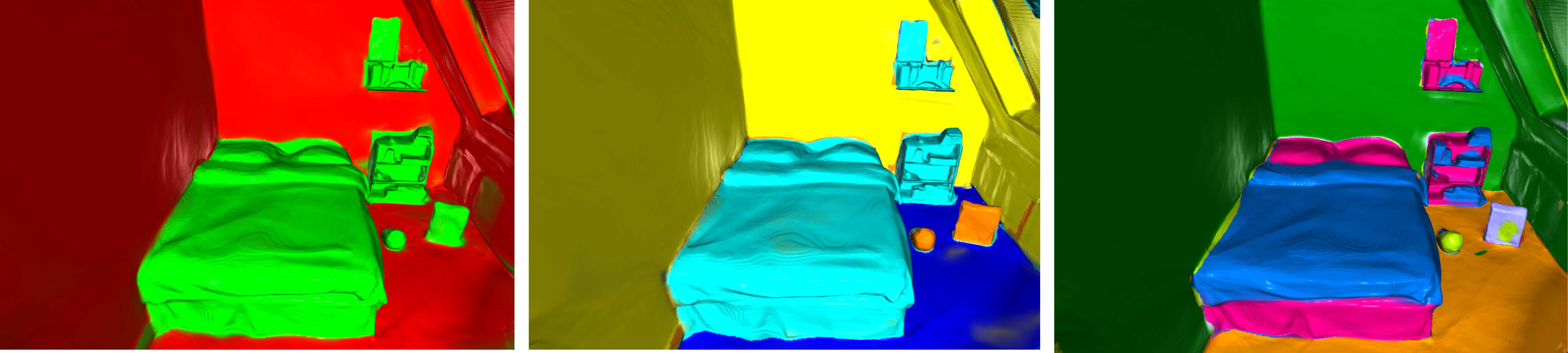
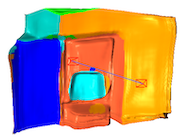
We leverage differential rendering to learn complete 3D scans with semantic labelling without any 3D annotations. |
|
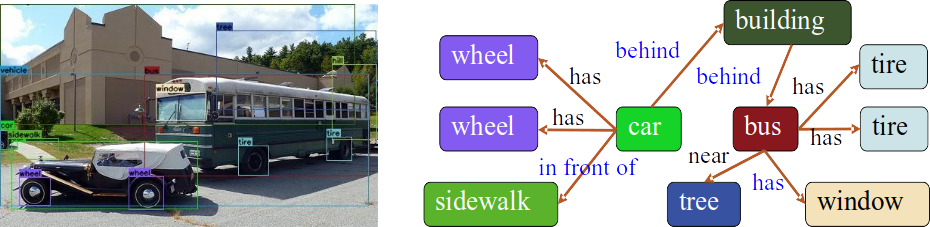
We propose EDAL, a novel AL framework tailored for the SGG task leveraging Evidential Deep Learning (EDL) and diversity-based debias modules. |
|
We build an online interactive 3D scene labelling and understanding system upon 3D neural field representation of geometry, colour and semantics.
|
|
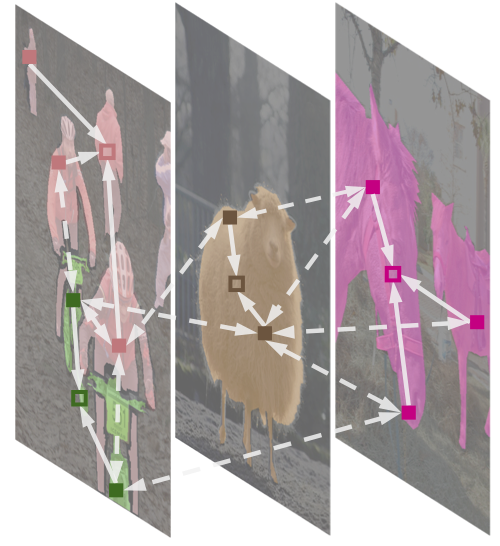
We present ReCo, a new contrastive learning framework designed at a regional level to assist learning in semantic segmentation. ReCo performs (semi-)supervised pixel-level contrastive learning on a sparse set of hard negative pixels. With minimal extra memory footprint, Reco boosts exsiting baselines by a large margin, revealing hierarchical similarities of various semantic classes as well. |
|
We show that neural radiance fileds (NeRF) contains strong priors for scene cluster and segmentation. The internal multi-view consistency and smoothness make the training process itself a multi-view semantic fusion process.
Such a scene-specific implcit semantic representation can be efficiently learned with various sparse or noisy annotations, leading to accurate dense labelling of the full scene.
|
|
We show that an efficient code representation is able to control the semantic label prediction of an image.
Latent codes of overlapping images can be jointly optimised to perform coherent semantic fusion.
We also show how this approach can be used within a monocular keyframe based semantic
mapping system where a similar code approach is used for geometry.
|
|
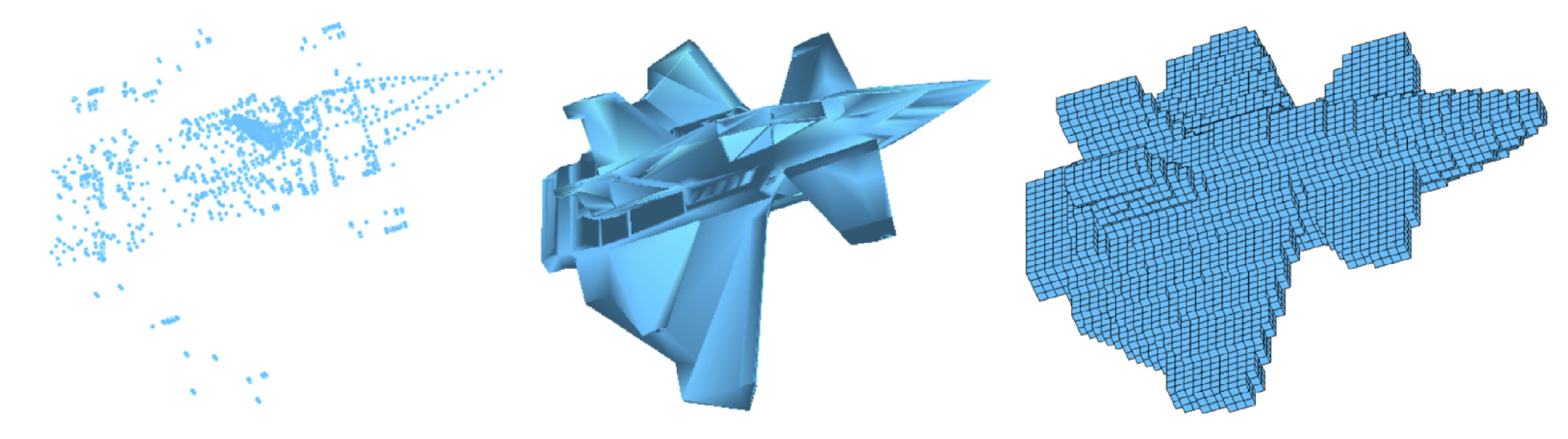
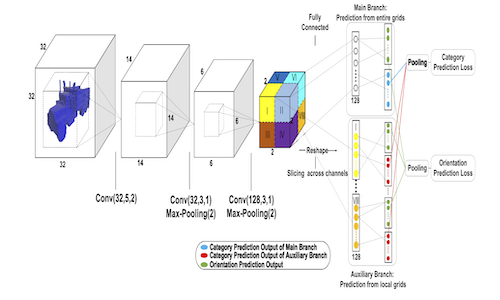
We propose LightNet, a light-weight 3D volumetric CNN for real-time 3D object classification. This paper subsumes the 3DOR 2017 paper LightNet. |
|
|
|
|
 |
Reviewer in 2022: CVPR, ICLR, ICML, ICME, ICVR (ordinary PC member), WCCI
|
|
Lab Assistant, Robotics (Online with Coppeliasim!), Spring 2021
|
|
Thank Dr. Jon Barron for sharing the source code of the website. |